Introducción.
Las ventajas de que disponemos actualmente los que nos dedicamos a la electrónica aplicada en cualquiera de sus facetas, es realmente para tener en cuenta. Hace poco tiempo (ciertamente, cada vez queda más lejos), no disponíamos de las herramientas físicas y las de software con las prestaciones que se presentan en estos tiempos. Esto es verdaderamente bueno.
En lo referente a equipos físicos, el que empieza es evidente que no pueda disponerlas, sin embargo en el apartado de software, existen una serie de herramientas que prestan gran ayuda a los diseñadores incluso a los que empiezan, facilitando su tarea y aprendizaje en los últimos, esto repercute en un mejor aprovechamiento del tiempo y un mayor rendimiento.
Hay una gran variedad de paquetes EDA (Herramientas de CAD Electrónico) estas herramientas, unas mas conocidas que otras, entre ellas podemos citar: TangoPCB, Elegance, Livewire, Proteus VSM, ExpresPCB, Eagle, etc. Todas son marcas registradas, algunas de ellas disponen de versiones demo que pueden servir para conocer su funcionamiento. Aquí, nos ocuparemos del PROTEUS©, versión 7, se disponen de manuales en español, muy muy buenos y muy extensos, los cuales sacarán de dudas a quien las tenga, más tarde les doy algunos enlaces.
Una de estas herramientas es la que nos ocupa en este práctico y rápido manual con un nivel superficial. Se trata es poner en manos del estudiante, lector o interesado, las bases mínimas para poner en práctica las ideas o necesidades que le surjan en el ejercicio de su trabajo o simplemente para su entretenimiento (hobby), por lo tanto, será sólo eso un asomo al uso de esta herramienta de diseño y análisis electrónico, dejando para otros manuales ya existentes la labor de desarrollar en profundidad su conocimiento a fondo.
El objetivo de esta clase tutorial es de mostrar, por la creación de un simple esquemático, como conducir una simulación interactiva que usa Proteus VSM. Mientras nos concentramos en el empleo de Componentes Activos y las instalaciones de eliminación por depurado de fallos del editor ISIS también miraremos lo básico de presentar una dirección de circuito esquemática y general. La cobertura plena de estos temas puede ser encontrada en el Manual ISIS.
PROTEUS VSM.
La herramienta PROTEUS© es un entorno integrado diseñado para la realización completa de proyectos para construcción de equipos electrónicos en todas sus etapas. Proteus el Sistema Virtual de Modelado (VSM) combina el modo mixto la simulación de circuito de SPICE, componentes animados y modelos completos de diseños basados en microprocesador para facilitar la co-simulación del microcontrolador. Esta herramienta dispone de los módulos conocidos por: Captura de esquemáticos ISIS, Layout de ARES PCB y Simulador (ProSpice/VSM). Por primera vez, es posible desarrollar y probar diseños antes de construir un prototipo físico.
Captura de Esquemático ISIS.
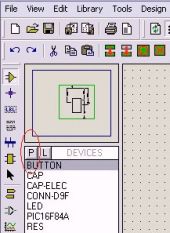
Una vez instalado el programa, iniciar ISIS, se presenta la suite de diseño en la que se aprecian dos zonas, a la izquierda un visor del plano del proyecto, debajo, la ventana para mostrar dispositivos y a la derecha la zona de trabajo propiamente dicha, en la que el diseñador trazará los circuitos eléctricos con sus componentes, posteriormente podrá ejecutar un modelo virtual que simule su proyecto en funcionamiento.

En la columna de la izquierda pulsamos sobre el botón P que nos antepone la ventana de librerías, en esta ventana elegiremos el dispositivo que necesitemos con doble-click, eligiendo otros componentes del mismo modo, lo que enviará dichos dispositivos a la ventana principal, en la columna de la izquierda donde aparecen los componentes a usar. Incorpora una librería de más de 6.000 modelos de dispositivos digitales y analógicos. En posteriores tutoriales se describirá su funcionamiento.
Layout (Diseño) de ARES PCB.
Es la herramienta que usaremos para la elaboración de nuestras placas de circuito impreso, ARES dispone de un posicionador automático de elementos, con generación automática de pistas. El diseñador con experiencia ya no tiene que hacer el trabajo duro, es el PC quien se encarga de esta tarea.
PROSPICE.
Se trata de una herramienta de simulación de circuitos según el estándar industrial. La versión básica, suministrada con todas las versiones de Proteus, sólo soporta análisis de transitorios.
VSM.
VSM es la herramienta integrada que incluye PROTEUS, se trata de un completo simulador para esquemas electrónicos que contienen microprocesador. El corazón de VSM es ProSPICE, un producto que combina un núcleo de simulación analógica usando el estándar SPICE3f5, con modelos animados de los componentes electrónicos y los microprocesadores que comprenden el circuito, tanto si el programa se ha escrito en ensamblador como si se ha utilizado un lenguaje de alto nivel, permitiendo interactuar con nuestro diseño, utilizando elementos gráficos animados realizando operaciones de indicadores de entrada y salida.
La simulación se realiza en tiempo casi real, los efectos se pueden considerar prácticamente como a tiempo real. Incorpora prácticos controles de depuración paso a paso y visualización del estados de las variables. La característica más sorprendente e importante de VSM es su capacidad de simular el software que se ejecuta en el microcontrolador y su interacción con cualquier componente electrónico digital o analógico conectado a él.
Ejecución del programa con microprocesadores.
Como podremos comprobar y según dice el fabricante, la característica más sorprendente e importante de VSM es su capacidad de simular el software que se ejecuta en el microcontrolador y su interacción con cualquier componente electrónico digital o analógico conectado a él.
Veamos un ejemplo sencillo; Trazamos un circuito sencillo compuesto por unos pocos componentes alrededor de un microcontrolador como el PIC16F84A, el siguiente puede ser el esquema de lo descrito.
>
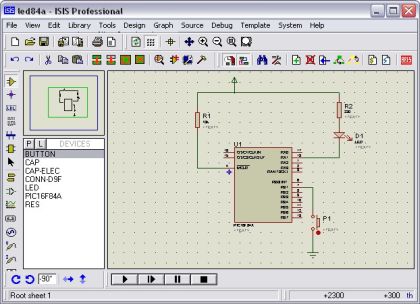
En el esquema se aprecia un pulsador P1, un LED con su resistencia R2 de seguridad, la resistencia R1 para el reset y el micro PIC16F84A. Al usar el puerto B como entrada, por software reducimos componentes, como son las resistencias de pull-up del puerto B que internamente ya dispone.
Uso del Capturador ISIS
Una vez iniciado el programa, elegimos los componentes que se van a usar. Pulsamos sobre el icono
 Fig. 4
Fig. 4
Esto abrirá una ventana como la que se muestra debajo, en ella se aprecian tres columnas con distintas posibilidades:
La columna de la izquierda tiene una celda en la que podemos entrar el código del dispositivo deseado y podemos automatizar su búsqueda, para ello hemos de conocer el nombre con el que figura en las librerías disponibles, en otro caso, no dará buenos resultados.
Debajo de esta celda se encuentra un área con nombre «Category:» en ella se ven los nombres de las categorías de los dispositivos y series que aparecen en las librerías, debajo las subcategorías con algo mas de definición por familias y debajo se muestra los distintos fabricantes.
En la medida en que elijamos las distintas categorías, así, se podrá seleccionar con una mayor precisión, el dispositivo deseado para la realización más exacta de nuestro proyecto. Aún así, puede que no se disponga del dispositivo exacto, es el momento de actualizar o pedir información al fabricante por una opción que nos pueda interesar.

Fig. 6
La columna central, nos mostrará una lista con una cierta cantidad de elementos y una descripción, dependiendo del elemento que estemos buscado, podremos encontrar el dispositivo necesitado, moviendo la corredera correspondiente, al seleccionarlo su símbolo y su representación esquemática será mostrada en la columna de al lado. Estas operaciones se tienen que realizar por cada uno de los elementos que constituyen nuestro circuito, de modo que al llegar a esta situación, habiendo encontrado el dispositivo buscado, para ganar tiempo sólo hay que dar un doble-click sobre el mismo y sin cerrar esta ventana podremos seguir buscando más elementos. Cuando demos por terminada la lista de componentes pulsaremos «OK» para salir.
Debajo de esta celda se encuentra un área con nombre «Category:» en ella se ven los nombres de las categorías de los dispositivos y series que aparecen en las librerías, debajo las subcategorías con algo mas de definición por familias y debajo se muestra los distintos fabricantes.
En la medida en que elijamos las distintas categorías, así, se podrá seleccionar con una mayor precisión, el dispositivo deseado para la realización más exacta de nuestro proyecto. Aún así, puede que no se disponga del dispositivo exacto, es el momento de actualizar o pedir información al fabricante por una opción que nos pueda interesar.
La columna central, nos mostrará una lista con una cierta cantidad de elementos y una descripción, dependiendo del elemento que estemos buscado, podremos encontrar el dispositivo necesitado, moviendo la corredera correspondiente, al seleccionarlo su símbolo y su representación esquemática será mostrada en la columna de al lado. Estas operaciones se tienen que realizar por cada uno de los elementos que constituyen nuestro circuito, de modo que al llegar a esta situación, habiendo encontrado el dispositivo buscado, para ganar tiempo sólo hay que dar un doble-click sobre el mismo y sin cerrar esta ventana podremos seguir buscando más elementos. Cuando demos por terminada la lista de componentes pulsaremos «OK» para salir. Iconos de accesos varios Es de especial interés que al elegir un componente (siempre que sea posible) nos decidamos por el que disponga de simulación animada, como pueden ser componentes de entrada (generadores, motores) o de salida (LEDs, Display, LCD, motores). La figura de la derecha puede ayudar al lector a identificar los elementos esenciales para localizar, seleccionar, girar y emplazar cada uno de los componentes en un determinado circuito.>Es de especial interés que al elegir un componente (siempre que sea posible) nos decidamos por el que disponga de simulación animada, como pueden ser componentes de entrada (generadores, motores) o de salida (LEDs, Display, LCD, motores). La figura de la derecha puede ayudar al lector a identificar los elementos esenciales para localizar, seleccionar, girar y emplazar cada uno de los componentes en un determinado circuito.
 Fig. 7
Fig. 7
El botón corresponde a las librerías y muestra el contenido de las mismas, esto no lo vamos a ver aquí, ya que se trata de un repaso rápido sobre esta maravillosa herramienta, hay otros manuales muy buenos que están hechos en español, por citar uno de ellos podemos citar los; 11 video Tutoriales, hechos por Germán Tojeiro sobre Proteus entre otros, buscando en la red puede encontrar información en páginas sobre el tema.
Una vez seleccionados todos los componentes necesarios para el desarrollo del circuito esquemático, procederemos a la ubicar en el área de trabajo cada unos de los componentes. Para ello, seleccionamos en la columna de la izquierda el componente a ubicar, por ej. el microcontrolador, en el visor de arriba se muestra la posición del componente, si es necesario el usuario mediante las flechas de girar y rotar adecuará la posición del mismo con un click en el lugar elegido. Ahora seguirá con los demás componentes, procurando ubicarlos en lugares cercanos entre si para que estén relativamente juntos como se aprecia en el gráfico que se muestra más arriba.
Quizás el lector ya haya creado el listado del programa que vamos a implementar en esta práctica, en otro caso este es el momento de hacerlo o tal vez se decida por copiar y pegar el listado que está debajo, para evitar que surjan problemas derivados de la ruta entre el Proteus y el propio programa en asm, es conveniente que éste se ubique en una carpeta donde esté el Proteus. Si ya tenemos todo como se ha descrito, es el momento de seguir.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 |
;======================================================= ; El esquema: PIC16F84A --> 1 Pulsador Enciende 1 LED ; +Vcc --pin1 R1- 1k pin2-- pin 4 ; +Vcc -- -- -- pin14 ; masa -- -- pin5 ; masa -- C2 22pf -- pin15 ; masa -- C2 22pf -- pin16 ; pin15 -- Cristal 4 MHz -- pin16 ; masa -- K LED1 A -- R2 ; A LED1--pin1 R2 220 pin2-- pin6 ; +Vcc -- Pulsador -- pin1 R3 ; pin2R3-- R3 de 5k -- pin18 ; masa -- pin1 R4 de 1k -- pin18 ; ;======================================================== TITLE "ledpuls" ; SUBTITLE "Revision Nº 1" ERRORLEVEL -302, -306 PROCESSOR 16F84A ; ; ; El esquema: PIC16F84A --> 1 Pulsador Enciende 1 LED ;---------------Encabezado------------- List p=16F84 #include <P16F84A.inc> ;------------mapa de memoria--------- cont EQU 0A ;-------Configuración de puertos------- reset: ORG 0 GOTO inicio ORG 5 inicio: BSF STATUS,5 ; configurando puertos MOVLW 0x02 ; carga w con 0000 0010 MOVWF TRISA ; ahora RA1 es entrada MOVLW 0x00 ; carga w con 0000 0000 MOVWF TRISB ; y el puerto B salida BCF STATUS,5 CLRF PORTB ; limpio el puerto B CLRF cont ; limpio el contador BSF cont,0 ; pongo el contador a 1 ;------------------------------------------ test: BTFSC PORTA,1 ; si alguien presiona CALL led ; voy a la etiqueta "led" GOTO test ; sino me quedo esperando led: BTFSC cont,0 ; si el contador está a 1 GOTO on_led ; lo atiendo en "on_led" BCF PORTB,0 ; sino, apago el LED BSF cont,0 ; pongo el contador a 1 GOTO libre ; y espero que suelten el pulsador on_led: BSF PORTB,0 ; enciendo el LED CLRF cont ; pongo el contador a 0 libre: BTFSC PORTA,1 ; si no sueltan el pulsador GOTO libre ; me quedaré a esperar RETURN ; si lo sueltan regreso ; a testear nuevamente ;------------------------------------------ END ;------------------------------------------ |
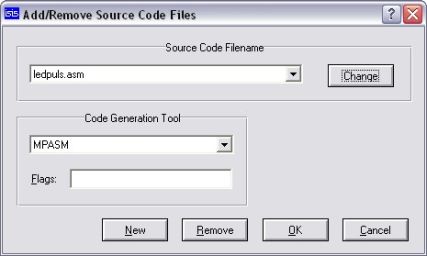
Con esto ya tenemos el circuito terminado. Si queremos simularlo entonces debemos proceder de la siguiente forma. En la barra de menú, seguir estos pasos: ir a Source/Add/Remove… como se aprecia en la imagen.
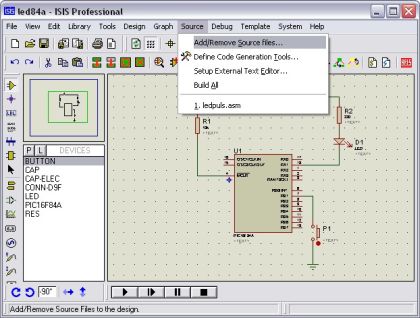
Ahora, con el menú Source, se abre una persiana con distintas opciones que describiremos, seleccionamos la primera Add/Remove souce fikes esto presenta a ventana de abajo, en la que primero seleccionamos la herramienta para generar el código (Code Generation Tool), en este caso MPASM, luego seleccionamos el fichero en código asm que contiene el programa que deseamos ejecutar en el micro, exactamente el mismo que cargaríamos en el chip real, con el buscador dentro de la carpeta donde lo tengamos, con el botón «Change«, no actuaremos sobre los flags (banderas) en este caso y pulsamos «OK» para finalizar, se cerrará la ventana.
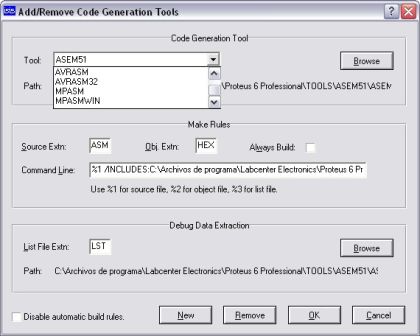
El siguiente paso es elegir la herramienta para definir la generación del código (Define Code Generation Tools…), en la celda de la persiana «Tool» seleccionamos MPASM, el resto no se toca y para terminar pulsar OK.
Volver a «Source» en la opción «Setup External Text Editor» del menú, nos puede servir para indicarle al ISIS que queremos usar nuestro editor habitual, en otro caso no se toca. Cuando lo tenemos todo configurado, entonces usaremos la opción «Build» para que nos genere el archivo HEX, podría ser que tuviéramos algún error en cuyo caso nos mostrará en una ventana indicando donde y cuales son las líneas que dan el error para su corrección. La última opción, nos sirve para editar el archivo en ASM, con el que corregir los posibles errores.
Personalmente llegado el caso de la aparición de errores, hago una copia del programa en asm y mediante el MPLAB hago la depuración del código, una vez he solucionado todos los errores, hago un copiado del programa terminado y lo pego en el sitio donde estaba en el Proteus, ahora ya lo tengo depurado, sin embargo lo de nuevo por el «Build» para que me confirme lo evidente, este paso no es necesario si también he copiado el archivo hex generado por el MPLAB.

Fig. 11
El siguiente paso es: Seleccionar el microcontrolador en el esquema (en este caso PIC16F84A), estará resaltado en rojo, entonces pulsamos el botón izquierdo del ratón (dije, el izquierdo, ¡se ha borrado el componente!, hacer CRTL-Z, volverá todo a su sitio) y se abrirá la siguiente ventana:

En primer lugar si es el caso, modificaremos la frecuencia del reloj, en la imagen, la celda con asterisco, según tengamos previsto. Después, en «Program File:», pulsaremos sobre la carpeta que aparece y buscaremos el archivo HEX que se ha generado (debe estar en el mismo sitio que el listado ASM) seleccionar y aceptar, si se tienen mas definiciones o propiedades se pueden indicar en el apartado del pié del cuadro y aceptar en OK. Con esto el programa ISIS, ya dispone de la información básica necesaria para proceder a la simulación virtual del programa.
Panel de simulación.
Las simulaciones interactivas son controladas por un simple VCR, como el panel que se comporta como un mando a distancia normal. Este control se sitúa en el lado izquierdo inferior de la pantalla. Si no es visible se debe seleccionar la opción de Animación de Circuito del menú de Gráfico. Hay cuatro botones con los que se suele controlar el flujo del circuito.

Fig. 12
– El botón Play, inicia la ejecución continuada del programa.
– El botón de modo PASO simple o paso a paso para seguir con detalle el proceso, lo que nos ayudará a la hora de depurar nuestro programa. Si el botón es presionado y liberado entonces avanzará la simulación un paso, si el botón se mantiene presionado entonces los avances de animación continuamente hasta que el botón sea liberado.
– El botón de PAUSA suspende la animación y entonces puede ser reactivada pulsando el botón de PAUSA otra vez, o solo dado un paso presionando el botón de PASO. El simulador también entrará en el estado de pausa si encuentran un punto de interrupción.
– El botón de PARADA indica a PROSPICE deja de hacer la simulación en tiempo real. Toda la animación es parada y el simulador es descargado de la memoria. Todos los indicadores son reiniciados a sus estados inactivos pero los actuadores (interruptores etc.) conservan sus ajustes existentes.
Se puede configurar el incremento de tiempo de paso simple, usando el botón de PASO vía el cuadro de diálogo de Configuración de Circuito Animado (es decir la cantidad de tiempo avanzado por cada vez que se presione del botón). La capacidad de tiempo de paso es útil para supervisar el da la vuelta más estrechamente y la vista en el movimiento lento que afecta que.

Fig. 13
Notar que el botón de paso simple sobre el panel de control de animación es usado para avances incrementales de sistema, pero no para pasos simples por el código donde requieren la regularidad específica – eliminando fallos del código se comenta con detalle aquí.
Durante una animación, el tiempo de simulación actual y la carga media de CPU se muestran en la barra de estado. Si la potencia de la CPU es insuficiente para controlar la simulación en tiempo real, la lectura mostrará el 100 % y el tiempo de simulación dejará de avanzar en tiempo real. Aparte de esto, ningún daño a resaltar de simular muy rápido circuitos, como el sistema automáticamente regula la cantidad de simulación realizada por marco de animación.
Aparte de componentes ordinarios electrónicos, las simulaciones interactivas generalmente aprovechan, usan Componentes especiales Activos. Estos componentes tienen un número de estados gráficos y vienen en dos condiciones: Indicadores y Actuadores. Los indicadores muestran un estado gráfico que se cambia según algún parámetro moderado del circuito, mientras los Actuadores permiten determinar por el usuario su estado, para luego modificar alguna característica del circuito.
Los actuadores son designados por la presencia de los pequeños símbolos de marcador rojos que pueden ser pulsados con el ratón para manejar el control. Si se tiene un ratón con una rueda, también se pueden manejar los actuadores señalando en ellos y haciendo rodar la rueda en la dirección apropiada.
LA SIMULACIÓN.
Tradicionalmente, la simulación de circuitos ha sido un asunto no interactivo. En los primeros días, complejos listados fueron preparados a mano, cuya salida consistía en un montón de números. Si se tenía suerte, obtenían una salida pseudo-gráfica trazada con asteriscos para mostrar el voltaje y formas de onda de las corrientes.
Recientemente, se ha convertido en norma la captura esquemática sobre pantalla gráfica, pero el proceso de simulación es todavía no-interactivo [se dibuja el circuito, se imprime y entonces] se estudia el resultado en una especie de procesado posterior.
Esto es en esencia, si el circuito que se prueba es esencialmente estático en su comportamiento, por ejemplo, un oscilador que oscila a 1MHz simplemente. Sin embargo, si se diseña una alarma antirrobo y se quiere averiguar que pasa cuando un ladrón sin llaves entra el (PIN) número de identificación personal incorrecto en el teclado numérico, la función requerida se hace bastante poco práctica y hay que recurrir a un prototipo físico. Esto es una vergüenza, cómo trabajando en el «ciberespacio» que tiene tanto para ofrecer en términos de productividad de diseño y sin embargo carece de este tipo de simulador.
Sólo en círculos educativos, se ha hecho una tentativa para presentar la simulación de un circuito como la vida real, en la electrónica, donde es posible actuar recíprocamente con el circuito mientras éste es simulado. El problema aquí ha sido que, los modelos de componentes animados han sido arduamente codificados en el programa. Sólo un número limitado de dispositivos simples se han ofrecido, como motores eléctricos, interruptores, bombillas, etc. y estos son de poco uso al usuario profesional. Además, la calidad de simulación de circuito a menudo no se aproximaba mucho a lo deseado. Por ejemplo, un producto principal de este tipo no tiene ninguna información de temporizadores dentro de sus modelos digitales.
Si el programa escribe en uno de los puertos del micro, los niveles lógicos en los circuitos cambian de acuerdo con esto. Y si los circuitos provocan el cambio en el estado de alguno de los pines del microprocesador, entonces estos se visualizarán en pantalla de acuerdo al programa ejecutado. Exactamente como en la vida real.
Los modelos de CPU utilizados por VSM emulan por completo los puertos de entrada y salida, las interrupciones, los temporizadores, los puertos USART y cualquier otro periférico presente en cada uno de los microprocesadores soportados. A diferencia de un simulador de software más sencillo, la interacción de todos estos periféricos con los circuitos externos, se realiza completamente utilizando modelos de ondas.
El simulador VSM, si el proyecto lo requiere, puede simular esquemas electrónicos que contengan más de un microprocesador. Para lo cual, simplemente se colocan los microprocesadores en el esquema y se cablean entre sí o con el resto de la circuitería. VSM es una herramienta única por su capacidad de ejecutar simulaciones cercanas al tiempo real de sistemas completos basados en microprocesadores. Sin embargo, su potencia real se descubre al realizar simulaciones en el modo de ejecución del programa paso a paso. Es entonces cuando se comprueba que VSM trabaja justo igual que el depurador de software preferido.
La mejor descripción es una muestra, continuando con el ejemplo que venimos desarrollando. En este punto, pulsaremos el mencionado botón para ejecutar la simulación. Que ocurre al pulsar «Play». En primer lugar, el circuito muestra unos puntos rojos en algunos extremos de ciertos componentes, si reparamos en ello, veremos que esto ocurre en los puntos que en un caso real estarían en nivel lógico alto, el color de los que están a nivel bajo se representan en azul, esto no indica en un primer momento, mucha información de los estados en los puntos que nos interesen controlar, como se puede ver en la imagen.

Fig. 14
Se ha modificado en el circuito, el componente LED estándar por un LED «animado», es decir, que interactúa, cuando una corriente adecuada le atraviesa, el LED modifica su apariencia mostrando que está activado como en el mundo real. Además, se observa que en este estado, los componentes que configuran el circuito, no pueden ser modificados, esto es debido al hecho de estar ejecutándose la simulación. En la barra de mensajes LOG, se muestra en verde, la cuenta del tiempo transcurrido de la simulación.
Por otra parte, si actuamos con el puntero del ratón sobre el componente identificado como pulsador, si todo transcurre bien, observamos que el contacto del pulsador conectado al micro, cae de nivel al ser pulsado y esto conmuta el estado del LED, esto es debido al código que se está ejecutando junto con la simulación. Con cada pulsación, se conmuta el estado del LED. En definitiva, esto es lo que se esperaba en la simulación, lo que confirmaría que el código que hemos escrito es correcto y adecuado para nuestros requisitos.
Esto es una simulación simple y como ya está depurado el programa no ha habido problemas en los que hayamos tenido que entrar a discutir o describir, no obstante, es cierto que no siempre será tan simple, por ese motivo vamos a contemplar un caso en el que se tenga que solucionar un problema, en el que tengamos que localizar un tramo de código el cual tengamos que cambiar o modificar en algún modo.
Simulación al Paso.
Cuando estamos simulando un programa, se pueden dar dos casos, uno como el anterior, donde todo va bien, aunque es más probable que se produzca algún tipo de error, en cuyo caso sería deseable poder acceder, en tiempo de ejecución al código que generamos, para ver in-situ su comportamiento. Y en este caso, para que podamos averiguar que ocurre y en que punto del programa se produce el resultado indeseado o el problema por llamarlo de algún modo, se encuentra la simulación al Paso. Veamos un caso concreto.
Listado fuente.
Para los objetivos de nuestra clase tutorial, hemos preparado el programa siguiente que permitirá al PIC controlar los semáforos. Este programa en un archivo fuente llamado TL.ASM.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 |
LIST p=16F84 ; PIC16F844 es el procesador objetivo #include "P16F84.INC" ; cabecera del archivo Include CBLOCK 0x10 ; Macro de memoria temporal state l1,l2 ENDC org 0 ; vector de inicio. goto setports ; salta al codigo de inicio org 4 ; vector Interrupt. alto: goto alto ; sentarse a esperar sin hacer nada. setports: clrw ; poner cero en W. movwf PORTA ; Asegura que PORTA es cero antes de habilitarlo. movwf PORTB ; Asegura que PORTB es cero antes de habilitarlo. bsf STATUS,RP0 ; Selecciona Bank 1 clrw ; Mascara para todos los bits como salida. movwf TRISB ; poner en registro TRISB. bcf STATUS,RP0 ; Regresa al Bank 0. initialise: clrw ; estado inicial. movwf state ; ponlo. loop: call getmask ; Convierte state a mascara de bits. movwf PORTB ; escribelo en el portb incf state,W ; Incrementa state en W. andlw 0x04 ; mantener cerca de cero. movwf state ; Ponlo en a la memoria call wait ; Esperar goto loop ; y lazo ; Función para devolver mascara de bits del estado actual en puerto de salida. ; El nibble superior contiene los bits para un juego de luces y el ; nibble bajo los bits para otros juego. Bit 1 es rojo, 2 es ambar ; y bit 3 es verde. El bit 4 no se usa. getmask: movf state,W ; mueva state a W addwf PCL,F ; añadir la compensación de W a PCL retlw 0x41 ; state==0 es Verde y Rojo retlw 0x23 ; state==1 es Ambar y Rojo/Ambar retlw 0x14 ; state==3 es Rojo y Verde retlw 0x32 ; state==4 es Reojo/Ambar y Ambar. ; Función que usa dos lazos para alcanzar un retardo. wait: movlw 5 movwf l1 w1: call wait2 decfsz l1 goto w1 return wait2: clrf l2 w2: decfsz l2 goto w2 return END |
De hecho, hay un error deliberado en dicho código, esto lo veremos más adelante. Este listado lo puede encontrar en los ejemplos del propio Proteus.
Enlazando el archivo fuente.
La siguiente etapa debe enlazar el programa al diseño para que podamos simular su comportamiento. Hacemos esto con las órdenes sobre el Menú Source. Ir al Menú Source y ahora seleccionar la Orden Agregar/Quitar Archivos Source. Hacer click en botón Nuevo, buscar (Change) hasta alcanzar el directorio «Samples\Tutorials» y seleccionar el archivo TL.ASM. Hacer click sobre Abrir y el archivo debería aparecer en la lista bajo el Nombre del archivo de Código original.
Ahora tenemos que seleccionar el instrumento de generación de código para el archivo. Para nuestros objetivos el instrumento MPASM bastará. Esta opción debería estar disponible de la lista desplegada y entonces pulsando el botón izquierdo se seleccionará de forma habitual. (Notar que si se planea usar un ensamblador nuevo o el compilador por primera vez, se tendrá que registrar usando la orden de Definir Instrumentos de Generación de Código).
Finalmente, es necesario especificar que archivo debe ejecutar el procesador. En nuestro ejemplo este será tl.hex (el archivo exadecimal producido por MPASM subsiguiente al tl.asm ensamblado). Para enlazar este archivo al procesador, botón derecho sobre el PIC en el esquema y pulsar luego el izquierdo sobre Editar Propiedades. Esto creará la forma de diálogo de Componente de Revisión que contiene un campo para el Archivo de Programa. Si esto no esta ya especificado en el tl.hex entrar a mano la ruta al archivo o buscar la posición del archivo vía el botón ‘?’ a la derecha del campo. Una vez que usted ha especificado el archivo exadecimal a controlar pulse Aceptar para salir del diálogo.
Ahora ya hemos enlazado el archivo fuente al diseño y hemos especificado el Generador de Código que se usará. Una explicación más detallada sobre el Sistema de Control de Código está disponible en la documentación de ayuda.
Simulando el circuito.
Para simular el circuito, pulsar con el ratón sobre el botón Play del panel de animación en el inferior de la pantalla y déjelo. La barra de estado debería aparecer con el tiempo que la animación ha sido activa. También deberíamos notar que uno de los semáforos es verde mientras el otro es rojo y el estado lógico de los pines se puede ver sobre el esquema. Nota, sin embargo, que los semáforos no cambian su estado. Esto está previsto, un error (bug) deliberado que hemos introducido en el código. En esta etapa, sería apropiado eliminar fallos de nuestro programa e intentar aislarlos del problema.
Depurar el programa.
Para asegurar que estamos atentos en la eliminación de fallos del circuito, pararemos la simulación corriente. Una vez que se ha hecho esto se puede comenzar a eliminar fallos, presionando CTRL+F12. Dos ventanas deberían aparecer – 1) propiedad valores CPU Registros corrientes y 2) propia que muestra el código fuente original del programa. Cualquiera de estas puede ser activada en el Menú Debug es un servidor de otras ventanas informativas. También podemos activar la Ventana Watch Window en la que podemos supervisar los cambios apropiados de la variable state. Una explicación completa de estas características está disponible en la sección titulada Watch Window en la documentación de ayuda.
Centrándonos por ahora en la ventana Source, en el lado izquierdo notar el icono flecha sobre punto rojo. Esto, con la línea resaltada indica la posición actual del contador de programa (PC). Para poner un punto de interrupción (breackpoint) aquí pulsar ENTER, el punto de ruptura siempre se resaltará la línea. Si quisiéramos limpiar el punto de ruptura lo podríamos hacer pulsando ENTER otra vez, pero en este momento lo dejaremos puesto.
Ajustar el Punto de Ruptura.
Mirando el programa, se pueden ver los bucles rotar sobre sí mismo en un ciclo que se repite. Por lo tanto es una buena idea el poner un punto de interrupción al principio de este lazo antes de empezar. Esto se puede hacer, pulsando el botón Pausa y resaltando la línea (en la dirección 000E) con el ratón y entonces pulsar F9. Luego pulsar F12 para poner el programa a correr. El programa se detendrá en el punto de ruptura que pusimos al principio del bucle.
El programa en el Menú Debug da una lista de las llaves de depuración, pero principalmente usaremos F11 para seguir el programa. Ahora pulsar F11, entonces la flecha roja de la izquierda (puntero) bajará a la próxima instrucción. Qué hemos hecho realmente, hemos ejecutado la instrucción «clrw» y se ha parado. Se puede verificar esto, viendo el registro W en la ventana de CPU Registros, advirtiendo que se ha puesto a cero.
Necesitaríamos determinar lo que esperamos que suceda en la ejecución de la próxima instrucción y entonces probarla, para ver si sucede realmente. Por ejemplo, la próxima instrucción del programa, debe mover el contenido del registro W al PUERTO A, es decir el Puerto A se debe limpiar. Debe advertirse que, ambos puertos han sido aclarados, listos para la salida (como indica el registro TRISB) y que la variable state ha sido puesta correctamente a 0. Ejecutar esta instrucción y verificar en la ventana CPU Registros, que esto es verdad. Continuar en esta línea, hasta que se alcance el punto de ruptura por segunda vez. Para ver mejor como se producen los pasos, pongamos otro punto de ruptura justo en la línea 0015, pulsando F9 y sigamos.
Como esto es una función de CALL (llamada) tenemos la opción de al Paso (pulsando F10), pero para asegurarnos pasaremos por cada instrucción. Al pulsar F11 aquí nos saltará a la primera línea ejecutable de la función de getmask y se parará. Al dar un paso más, vemos que la operación move era acertada ya que se ‘aterriza’ en el lugar correcto, para agregar una desviación de cero en la tabla de consulta. Por lo tanto, cuando volvemos al programa principal, tenemos la máscara que nosotros esperábamos. Dar aún un paso más para escribir la máscara al puerto y podemos ver el resultado correcto en el esquema. Un nuevo paso otra vez para incrementar state, también es un éxito como se ve en la ventana CPU Registros, donde el valor para el registro W es incrementado en 1.
Un paso nos tomará la instrucción diseñada para mantener state cerca de cero cuando se incrementa por arriba de 3. Esto, no funciona como debería, se puede ver en la Ventana Watch. Claramente, state se debe incrementar aquí para indicar 1 en la orden, para poner la máscara correctamente en la próxima ejecución del lazo.
Nos tomará un paso la instrucción diseñada, para mantener el registro state cerca de cero, cuando se incremente por encima de 3. Esto, no funciona como debería, se puede ver en la Ventana Watch. El registro state debe ser claramente incrementado para indicar 1 aquí de modo que la máscara sea puesta correctamente en la próxima ejecución del lazo.
Encontrar el fallo (bug).
Un vistazo más de cerca revela que el problema es causado por la orden AND con 4 en vez de 3. Los estados que queremos ver de la tabla son 0,1,2,3 y cualquiera de éstos sumado (ANDed) con 4 da 0. De ahí que al correr la simulación el estado de los semáforos no cambia. La solución del problema es cambiar simplemente en la instrucción AND (sumar) a state con 3 en lugar de 4. Esto significa que state se incrementará a 3 y cuando el registro W es incrementado a 4 state devolverá un 0. Una solución alternativa sería de probar simplemente para el caso cuando el registro «W» tenga 4 y para reiniciarlo poner a cero.
Este es un corto ejemplo que ilustra lo básico de las técnicas de depuración de fallos disponibles en Proteus VSM, hay mucha funcionalidad adicional disponible. Se recomiendan que se mire la sección sobre Nivel de Depuración de código fuente (Source Level Debugging) para una explicación más detallada.
NOTA. En próximos artículos que se produzcan, si es el caso, trataré de utilizar este programa de simulación y depuración Proteus, para mostrar otras cualidades del Proteus, de modo que el interesado pueda ampliar sus conocimientos. Procuraré poner en este sitio, los enlaces a dicho artículos cuando se produzcan.
Es una pena que desde esta página introductoria https://www.hispavila.com/category/teoria/manual-practico-proteus-vsm/ no se pueda llegar hasta aquí porque está mal indexada por un error en el link del pie del texto donde se espera que continue el tutorial.
El link erroneo apunta a la misma pàgina y no a esta pàgina con URL https://www.hispavila.com/manual-practico-deproteus-vsm/
Saludos
Hola Teimar
Espero que te sirva la rectificación.
Cierto, hay (había) un error en el enlace. Mis sinceras disculpas por el error, hacía mucho tiempo que no visitaba estas páginas debido a distintos motivos y te agradezco tu nota de atención.
Creo que he localizado el problema y lo he resuelto. He revisado que había algunas imágenes que se habían perdido, las he vuelto a poner en su sitio. Aunque suene a disculpa, he cambiado de empresa para el soporte de esta web en dos ocasiones y supongo que los fallos son debidos por esta causa, o por algún virus que me visitó en algún momento.
Te agradecería que me confirmaras que todo está bien enlazado en estos momentos.
Saludos.